摇臂式履带底盘利用前后两组摇臂各自的俯仰运动实现履带运动对不同地形的适应,比如摇臂上履带先搭上较高的台阶边缘,以实现攀爬。两侧履带差速运动是主运动,摇臂俯仰运动是辅助运动。
机器人履带底盘通过左右两侧履带运动的差速控制实现前进后退、左右转弯(甚至原地旋转)。摇臂式履带底盘利用前后两组摇臂各自的俯仰运动实现履带运动对不同地形的适应,比如摇臂上履带先搭上较高的台阶边缘,以实现攀爬。两侧履带差速运动是主运动,摇臂俯仰运动是辅助运动。

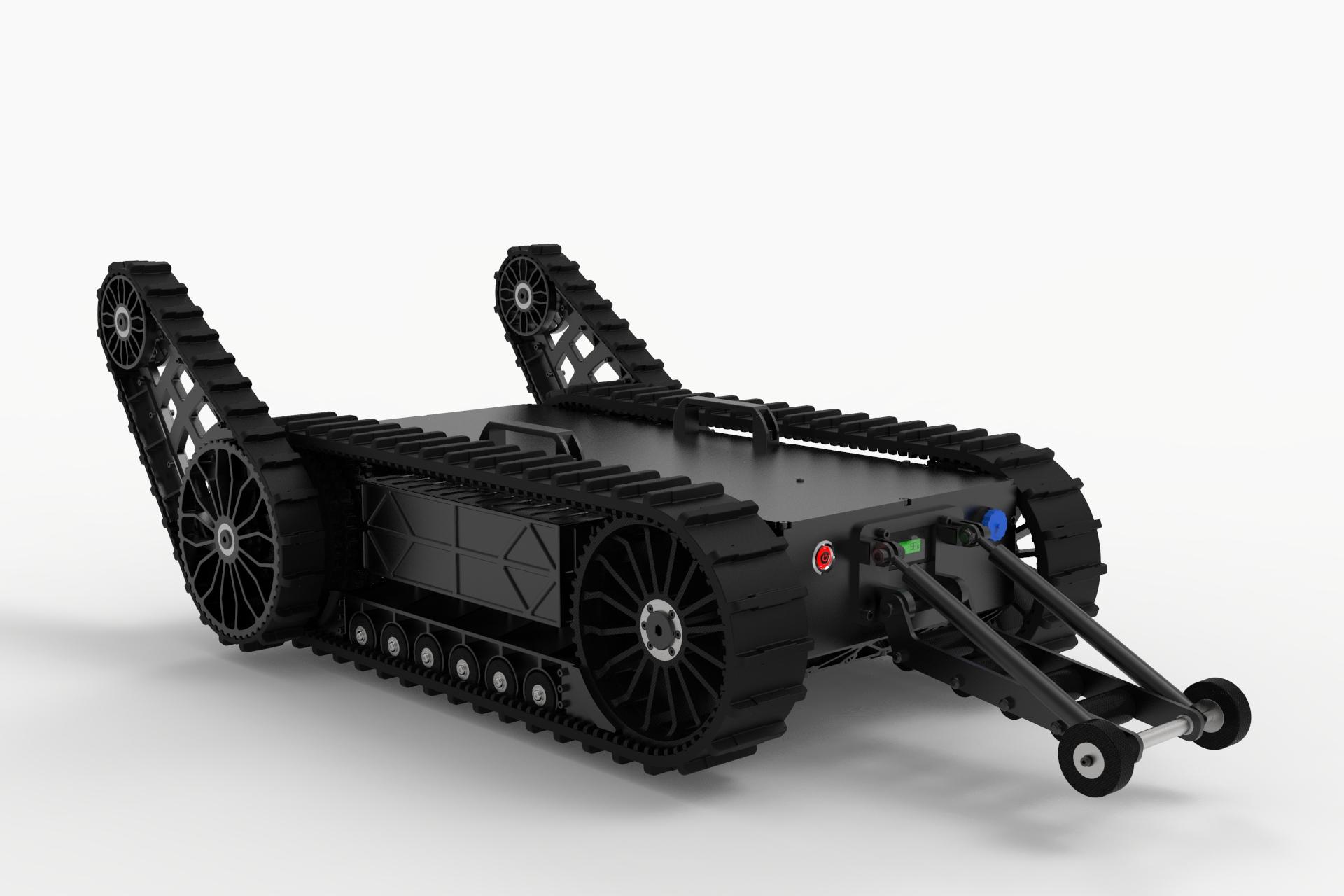
摇臂式履带机器人底盘在可通过性(尤其越障能力)方面是各类机器人履带底盘中的佼佼者。如图 4 所示。机器人履带底盘通过左右两侧履带运动的差速控制实现前进后退、左右转弯(甚至原地旋转)。摇臂式履带底盘利用前后两组摇臂各自的俯仰运动实现履带运动对不同地形的适应,比如摇臂上履带先搭上较高的台阶边缘,以实现攀爬。两侧履带差速运动是主运动,摇臂俯仰运动是辅助运动。






 17705316877
17705316877